#include <Engine.h>
Public Member Functions | |
| void | AddRef (UWorld *&WorldPtr) |
| void | RemoveRef (UWorld *&WorldPtr) |
| void | SetCurrentWorld (UWorld *World) |
| FORCEINLINE UWorld * | World () const |
Public Attributes | |
| EWorldType::Type | m_WorldType |
| std::string | m_ContextHandle |
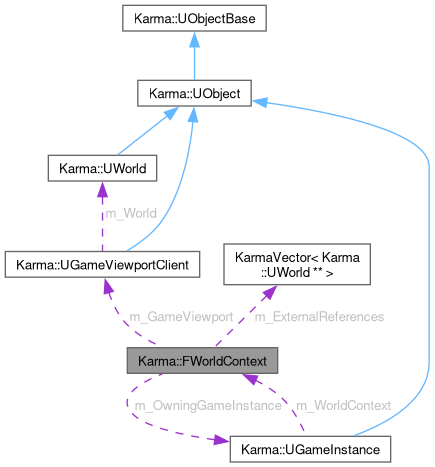
| class UGameViewportClient * | m_GameViewport |
| class UGameInstance * | m_OwningGameInstance |
| bool | m_RunAsDedicated |
| bool | m_bWaitingOnOnlineSubsystem |
| bool | m_bIsPrimaryPIEInstance |
| uint32_t | m_AudioDeviceID |
| float | PIEFixedTickSeconds = 0.f |
| float | PIEAccumulatedTickSeconds = 0.f |
| KarmaVector< UWorld ** > | m_ExternalReferences |
Detailed Description
FWorldContext: A context for dealing with UWorlds at the engine level. As the engine brings up and destroys world, we need a way to keep straight what world belongs to what.
WorldContexts can be thought of as a track. By default we have 1 track that we load and unload levels on. Adding a second context is adding a second track; another track of progression for worlds to live on.
For the GameEngine, there will be one WorldContext until we decide to support multiple simultaneous worlds. For the EditorEngine, there may be one WorldContext for the EditorWorld and one for the PIE World.
FWorldContext provides both a way to manage 'the current PIE UWorld*' as well as state that goes along with connecting/travelling to new worlds.
FWorldContext should remain internal to the UEngine classes. Outside code should not keep pointers or try to manage FWorldContexts directly. Outside code can still deal with UWorld*, and pass UWorld*s into Engine level functions. The Engine code can look up the relevant context for a given UWorld*.
For convenience, FWorldContext can maintain outside pointers to UWorld*s. For example, PIE can tie UWorld* UEditorEngine::PlayWorld to the PIE world context. If the PIE UWorld changes, the UEditorEngine::PlayWorld pointer will be automatically updated. This is done with AddRef() and SetCurrentWorld().
Member Function Documentation
◆ RemoveRef()
|
inline |
Removes an external reference
◆ SetCurrentWorld()
| void Karma::FWorldContext::SetCurrentWorld | ( | UWorld * | World | ) |
Set CurrentWorld and update external reference pointers to reflect this
◆ World()
|
inline |
Collect FWorldContext references for garbage collection
Member Data Documentation
◆ m_AudioDeviceID
| uint32_t Karma::FWorldContext::m_AudioDeviceID |
Handle to this world context's audio device.
◆ m_bIsPrimaryPIEInstance
| bool Karma::FWorldContext::m_bIsPrimaryPIEInstance |
Is this the 'primary' PIE instance. Primary is preferred when, for example, unique hardware like a VR headset can be used by only one PIE instance.
◆ m_bWaitingOnOnlineSubsystem
| bool Karma::FWorldContext::m_bWaitingOnOnlineSubsystem |
Is this world context waiting for an online login to complete (for PIE)
◆ m_ExternalReferences
| KarmaVector<UWorld**> Karma::FWorldContext::m_ExternalReferences |
On a transition to another level (e.g. LoadMap), the engine will verify that these objects have been cleaned up by garbage collection Outside pointers to CurrentWorld that should be kept in sync if current world changes
◆ m_RunAsDedicated
| bool Karma::FWorldContext::m_RunAsDedicated |
A list of active net drivers The PIE instance of this world, -1 is default The Prefix in front of PIE level names, empty is default The feature level that PIE world should use Is this running as a dedicated server
◆ PIEFixedTickSeconds
| float Karma::FWorldContext::PIEFixedTickSeconds = 0.f |
Custom description to be display in blueprint debugger UI
The documentation for this struct was generated from the following files:
- Karma/src/Karma/Engine/Engine.h
- Karma/src/Karma/Engine/Engine.cpp
Generated by